Transfer Learning with Neural Adapter
Transfer learning is a machine learning technique where a model trained on one task is re-purposed on a second related task.
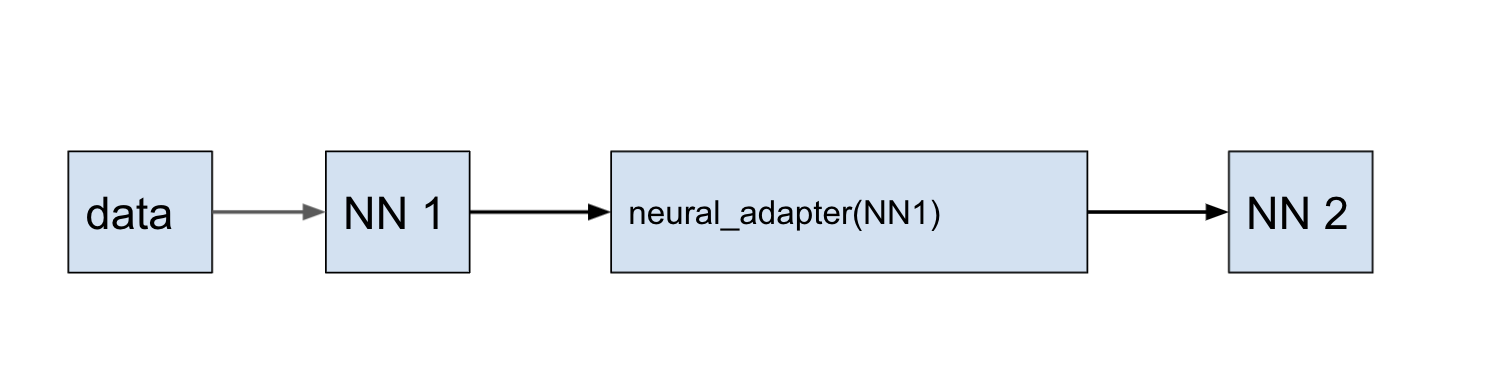
neural_adapter is the method that trains a neural network using the results from an already obtained prediction.
This allows reusing the obtained prediction results and pre-training states of the neural network to get a new prediction, or reuse the results of predictions to train a related task (for example, the same task with a different domain). It makes it possible to create more flexible training schemes.
Retrain the prediction
Using the example of 2D Poisson equation, it is shown how, using the method neural_adapter, to retrain the prediction of one neural network to another.
using NeuralPDE, Lux, ModelingToolkit, Optimization, OptimizationOptimisers
using ModelingToolkit: Interval, infimum, supremum
using Random, ComponentArrays
@parameters x y
@variables u(..)
Dxx = Differential(x)^2
Dyy = Differential(y)^2
# 2D PDE
eq = Dxx(u(x, y)) + Dyy(u(x, y)) ~ -sinpi(x) * sinpi(y)
# Initial and boundary conditions
bcs = [
u(0, y) ~ 0.0,
u(1, y) ~ -sinpi(1) * sinpi(y),
u(x, 0) ~ 0.0,
u(x, 1) ~ -sinpi(x) * sinpi(1)
]
# Space and time domains
domains = [x ∈ Interval(0.0, 1.0), y ∈ Interval(0.0, 1.0)]
strategy = StochasticTraining(1024)
inner = 8
af = tanh
chain1 = Chain(Dense(2, inner, af), Dense(inner, inner, af), Dense(inner, 1))
discretization = PhysicsInformedNN(chain1, strategy)
@named pde_system = PDESystem(eq, bcs, domains, [x, y], [u(x, y)])
prob = discretize(pde_system, discretization)
sym_prob = symbolic_discretize(pde_system, discretization)
callback = function (p, l)
println("Current loss is: $l")
return false
end
res = Optimization.solve(prob, OptimizationOptimisers.Adam(5e-3); maxiters = 10000,
callback)
phi = discretization.phi
inner_ = 8
af = tanh
chain2 = Chain(Dense(2, inner_, af), Dense(inner_, inner_, af), Dense(inner_, inner_, af),
Dense(inner_, 1))
initp, st = Lux.setup(Random.default_rng(), chain2)
init_params2 = ComponentArray{Float64}(initp)
# the rule by which the training will take place is described here in loss function
function loss(cord, θ)
global st, chain2
ch2, st = chain2(cord, θ, st)
ch2 .- phi(cord, res.u)
end
strategy = GridTraining(0.1)
prob_ = neural_adapter(loss, init_params2, pde_system, strategy)
res_ = solve(prob_, OptimizationOptimisers.Adam(5e-3); maxiters = 10000, callback)
phi_ = PhysicsInformedNN(chain2, strategy; init_params = res_.u).phi
xs, ys = [infimum(d.domain):0.01:supremum(d.domain) for d in domains]
analytic_sol_func(x, y) = (sinpi(x) * sinpi(y)) / (2pi^2)
u_predict = reshape([first(phi([x, y], res.u)) for x in xs for y in ys],
(length(xs), length(ys)))
u_predict_ = reshape([first(phi_([x, y], res_.u)) for x in xs for y in ys],
(length(xs), length(ys)))
u_real = reshape([analytic_sol_func(x, y) for x in xs for y in ys],
(length(xs), length(ys)))
diff_u = u_predict .- u_real
diff_u_ = u_predict_ .- u_real
using Plots
p1 = plot(xs, ys, u_predict, linetype = :contourf, title = "first predict")
p2 = plot(xs, ys, u_predict_, linetype = :contourf, title = "second predict")
p3 = plot(xs, ys, u_real, linetype = :contourf, title = "analytic")
p4 = plot(xs, ys, diff_u, linetype = :contourf, title = "error 1")
p5 = plot(xs, ys, diff_u_, linetype = :contourf, title = "error 2")
plot(p1, p2, p3, p4, p5)
Domain decomposition
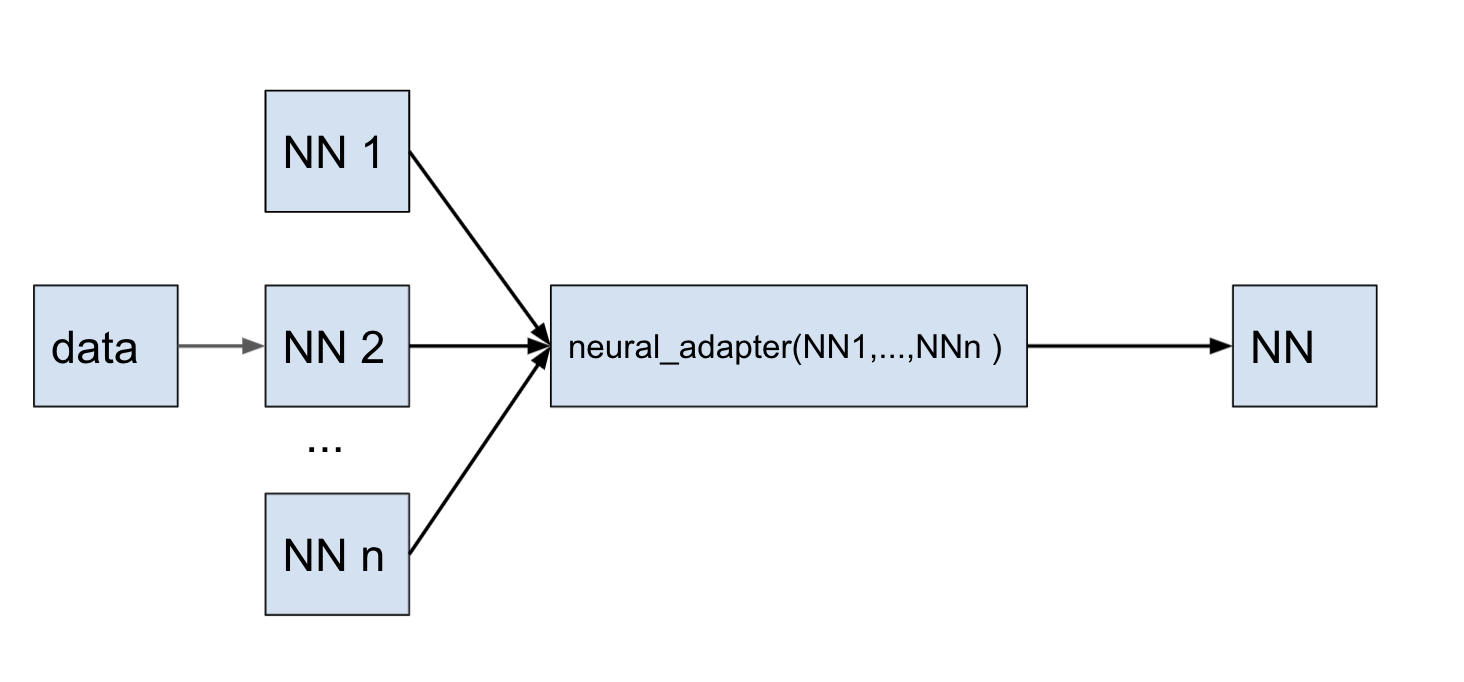
In this example, we first obtain a prediction of 2D Poisson equation on subdomains. We split up full domain into 10 sub problems by x, and create separate neural networks for each sub interval. If x domain ∈ [x0, xend] so, it is decomposed on 4 part: sub x domains = {[x0, x1], ... [xi,xi+1], ..., x3,xend]}. And then using the method neural_adapter, we retrain the batch of 10 predictions to the one prediction for full domain of task.
using NeuralPDE, Lux, ModelingToolkit, Optimization, OptimizationOptimisers
using ModelingToolkit: Interval, infimum, supremum
@parameters x y
@variables u(..)
Dxx = Differential(x)^2
Dyy = Differential(y)^2
eq = Dxx(u(x, y)) + Dyy(u(x, y)) ~ -sinpi(x) * sinpi(y)
bcs = [
u(0, y) ~ 0.0,
u(1, y) ~ -sinpi(1) * sinpi(y),
u(x, 0) ~ 0.0,
u(x, 1) ~ -sinpi(x) * sinpi(1)
]
# Space
x_0 = 0.0
x_end = 1.0
x_domain = Interval(x_0, x_end)
y_domain = Interval(0.0, 1.0)
domains = [x ∈ x_domain, y ∈ y_domain]
count_decomp = 4
# Neural network
af = tanh
inner = 10
chain = Chain(Dense(2, inner, af), Dense(inner, inner, af), Dense(inner, 1))
xs_ = infimum(x_domain):(1 / count_decomp):supremum(x_domain)
xs_domain = [(xs_[i], xs_[i + 1]) for i in 1:(length(xs_) - 1)]
domains_map = map(xs_domain) do (xs_dom)
x_domain_ = Interval(xs_dom...)
domains_ = [x ∈ x_domain_, y ∈ y_domain]
end
analytic_sol_func(x, y) = (sinpi(x) * sinpi(y)) / (2pi^2)
function create_bcs(x_domain_, phi_bound)
x_0, x_e = x_domain_.left, x_domain_.right
if x_0 == 0.0
bcs = [u(0, y) ~ 0.0,
u(x_e, y) ~ analytic_sol_func(x_e, y),
u(x, 0) ~ 0.0,
u(x, 1) ~ -sinpi(x) * sinpi(1)]
return bcs
end
bcs = [u(x_0, y) ~ phi_bound(x_0, y),
u(x_e, y) ~ analytic_sol_func(x_e, y),
u(x, 0) ~ 0.0,
u(x, 1) ~ -sinpi(x) * sinpi(1)]
bcs
end
reses = []
phis = []
pde_system_map = []
for i in 1:count_decomp
println("decomposition $i")
domains_ = domains_map[i]
phi_in(cord) = phis[i - 1](cord, reses[i - 1].u)
phi_bound(x, y) = phi_in(vcat(x, y))
@register_symbolic phi_bound(x, y)
Base.Broadcast.broadcasted(::typeof(phi_bound), x, y) = phi_bound(x, y)
bcs_ = create_bcs(domains_[1].domain, phi_bound)
@named pde_system_ = PDESystem(eq, bcs_, domains_, [x, y], [u(x, y)])
push!(pde_system_map, pde_system_)
strategy = StochasticTraining(1024)
discretization = PhysicsInformedNN(chain, strategy)
prob = discretize(pde_system_, discretization)
symprob = symbolic_discretize(pde_system_, discretization)
res_ = solve(prob, OptimizationOptimisers.Adam(5e-3); maxiters = 10000, callback)
phi = discretization.phi
push!(reses, res_)
push!(phis, phi)
end
function compose_result(dx)
u_predict_array = Float64[]
diff_u_array = Float64[]
ys = infimum(domains[2].domain):dx:supremum(domains[2].domain)
xs_ = infimum(x_domain):dx:supremum(x_domain)
xs = collect(xs_)
function index_of_interval(x_)
for (i, x_domain) in enumerate(xs_domain)
if x_ <= x_domain[2] && x_ >= x_domain[1]
return i
end
end
end
for x_ in xs
i = index_of_interval(x_)
u_predict_sub = [first(phis[i]([x_, y], reses[i].u)) for y in ys]
u_real_sub = [analytic_sol_func(x_, y) for y in ys]
diff_u_sub = abs.(u_predict_sub .- u_real_sub)
append!(u_predict_array, u_predict_sub)
append!(diff_u_array, diff_u_sub)
end
xs, ys = [infimum(d.domain):dx:supremum(d.domain) for d in domains]
u_predict = reshape(u_predict_array, (length(xs), length(ys)))
diff_u = reshape(diff_u_array, (length(xs), length(ys)))
u_predict, diff_u
end
dx = 0.01
u_predict, diff_u = compose_result(dx)
inner_ = 18
af = tanh
chain2 = Chain(Dense(2, inner_, af), Dense(inner_, inner_, af), Dense(inner_, inner_, af),
Dense(inner_, inner_, af), Dense(inner_, 1))
initp, st = Lux.setup(Random.default_rng(), chain2)
init_params2 = ComponentArray{Float64}(initp)
@named pde_system = PDESystem(eq, bcs, domains, [x, y], [u(x, y)])
losses = map(1:count_decomp) do i
function loss(cord, θ)
global st, chain2, phis, reses
ch2, st = chain2(cord, θ, st)
ch2 .- phis[i](cord, reses[i].u)
end
end
callback = function (p, l)
println("Current loss is: $l")
return false
end
prob_ = neural_adapter(losses, init_params2, pde_system_map, StochasticTraining(1024))
res_ = solve(prob_, OptimizationOptimisers.Adam(5e-3); maxiters = 5000, callback)
phi_ = PhysicsInformedNN(chain2, strategy; init_params = res_.u).phi
xs, ys = [infimum(d.domain):dx:supremum(d.domain) for d in domains]
u_predict_ = reshape([first(phi_([x, y], res_.u)) for x in xs for y in ys],
(length(xs), length(ys)))
u_real = reshape([analytic_sol_func(x, y) for x in xs for y in ys],
(length(xs), length(ys)))
diff_u_ = u_predict_ .- u_real
using Plots
p1 = plot(xs, ys, u_predict, linetype = :contourf, title = "predict 1");
p2 = plot(xs, ys, u_predict_, linetype = :contourf, title = "predict 2");
p3 = plot(xs, ys, u_real, linetype = :contourf, title = "analytic");
p4 = plot(xs, ys, diff_u, linetype = :contourf, title = "error 1");
p5 = plot(xs, ys, diff_u_, linetype = :contourf, title = "error 2");
plot(p1, p2, p3, p4, p5)